Elektrische broek doet vallen tot het verleden behoren
 Iedereen kent wel de elektrische fiets. De kans is zelfs reëel dat ook jij er een hebt. Deze gemotoriseerde fiets begon als een hulpje voor de oude dag, maar is nu zelfs in gebruik door jonge werknemers die per fiets zo fris als een hoentje op hun werk willen geraken. Een exoskelet is een uitwendig ijzeren skelet of robotpak dat de mens aantrekt als een elektrische broek en hem extra kracht geeft aan de heup, knie en enkel. Een exoskelet heeft het potentieel om mensen te helpen bij hun revalidatie, oudere mensen langer mobiel te houden of personen die zware arbeid verrichten te helpen op hun werk. Het exoskelet bevindt zich momenteel echter nog in zijn kinderschoenen, te vergelijken met de eerste auto's begin vorige eeuw. Net als de auto toen kent het exoskelet nu enkel een tuffende modus en moet een expert het exoskelet steeds begeleiden. Net zoals bij elke auto leveren ook de huidige commerciële exoskeletten alle kracht om vooruit te raken. In navolging van de elektrische fiets, moet ook het exoskelet de overgang maken naar een samenwerkingsmodel. Weg met het "mens stuurt aan, robot doet alles"-principe. Eendracht (tussen mens en exoskelet) maakt macht!
Iedereen kent wel de elektrische fiets. De kans is zelfs reëel dat ook jij er een hebt. Deze gemotoriseerde fiets begon als een hulpje voor de oude dag, maar is nu zelfs in gebruik door jonge werknemers die per fiets zo fris als een hoentje op hun werk willen geraken. Een exoskelet is een uitwendig ijzeren skelet of robotpak dat de mens aantrekt als een elektrische broek en hem extra kracht geeft aan de heup, knie en enkel. Een exoskelet heeft het potentieel om mensen te helpen bij hun revalidatie, oudere mensen langer mobiel te houden of personen die zware arbeid verrichten te helpen op hun werk. Het exoskelet bevindt zich momenteel echter nog in zijn kinderschoenen, te vergelijken met de eerste auto's begin vorige eeuw. Net als de auto toen kent het exoskelet nu enkel een tuffende modus en moet een expert het exoskelet steeds begeleiden. Net zoals bij elke auto leveren ook de huidige commerciële exoskeletten alle kracht om vooruit te raken. In navolging van de elektrische fiets, moet ook het exoskelet de overgang maken naar een samenwerkingsmodel. Weg met het "mens stuurt aan, robot doet alles"-principe. Eendracht (tussen mens en exoskelet) maakt macht!
Een goede samenwerking vindt altijd plaats in twee richtingen. Enerzijds moet het exoskelet de intenties van de mens goed interpreteren. Anderzijds moet de actie die het exoskelet uitvoert voor de mens voorspelbaar zijn en natuurlijk aanvoelen. Het exoskelet moet dus de mens begrijpen, maar de mens ook het exoskelet. Zoniet heeft de mens geen baat bij de geleverde assistentie. Voor een elektrische fiets is dat nog redelijk eenvoudig. Hoe harder/sneller je trapt hoe groter de assistentie is. Het exoskelet bestaat echter niet uit één motor, maar uit zes motoren die moeten samenwerken om de mens te assisteren. Het exoskelet moet daarom voorspellen welke beweging de enkels, knieën en heupen gaan maken en hierbij inschatten of de mens wil gaan zitten, een trap opgaan of gewoon wandelen. Voor revalidatie of ondersteuning van verzwakte personen is het zeer belangrijk om niet te veel assistentie te geven, zodat de persoon zelf zoveel mogelijk zijn eigen spieren traint. Het verschil tussen wat de mens zelf aankan en de totale krachten die nodig zijn om deze beweging uit te voeren, is wat het exoskelet moet leveren.
 We kunnen nog een stap verder gaan, door de mens niet alleen te assisteren, maar ook zijn evenwicht te corrigeren. Vandaag krijgen ouderen vaak het advies om te blijven bewegen, maar voorzichtig te zijn en zeker niet te vallen. Een exoskelet dat vallen voorkomt, is in staat om een actief leven te verzoenen met voorzichtigheid. Ook hier is het belangrijk om de goede samenwerking tussen mens en exoskelet te behouden. Een laattijdig ingrijpen heeft als gevolg dat het exoskelet een zeer bruuske en oncomfortabele actie moet ondernemen om de mens te corrigeren of dat het zelfs onmogelijk wordt om het evenwicht te behouden. Een exoskelet dat je te veel hindert in je bewegingen, gaat anderzijds al snel irriteren. Daarom voorspelt het exoskelet wanneer de mens dreigt te vallen, en grijpt het enkel dan in. De stabiliteit van de mens is vooral gekenmerkt door de snelheid en positie van zijn lichaam ten opzichte van de voeten. Leun je bijvoorbeeld sterk naar voren, dan is een klein duwtje genoeg om je uit evenwicht te brengen. Naast de beslissing om al dan niet in te grijpen, moet het exoskelet ook bepalen hoe het gaat ingrijpen. Hierbij probeert het exoskelet het evenwicht van de mens te herstellen zoals een mens zonder exoskelet dat zou doen. Indien iemand zijn evenwicht dreigt te verliezen, zal hij bijvoorbeeld sneller een stap zetten dan zich te bukken om zijn stabiliteit te verhogen. Door hiermee rekening te houden werkt het exoskelet de mens niet tegen en voelt ook deze corrigerende actie natuurlijk aan voor de mens.
We kunnen nog een stap verder gaan, door de mens niet alleen te assisteren, maar ook zijn evenwicht te corrigeren. Vandaag krijgen ouderen vaak het advies om te blijven bewegen, maar voorzichtig te zijn en zeker niet te vallen. Een exoskelet dat vallen voorkomt, is in staat om een actief leven te verzoenen met voorzichtigheid. Ook hier is het belangrijk om de goede samenwerking tussen mens en exoskelet te behouden. Een laattijdig ingrijpen heeft als gevolg dat het exoskelet een zeer bruuske en oncomfortabele actie moet ondernemen om de mens te corrigeren of dat het zelfs onmogelijk wordt om het evenwicht te behouden. Een exoskelet dat je te veel hindert in je bewegingen, gaat anderzijds al snel irriteren. Daarom voorspelt het exoskelet wanneer de mens dreigt te vallen, en grijpt het enkel dan in. De stabiliteit van de mens is vooral gekenmerkt door de snelheid en positie van zijn lichaam ten opzichte van de voeten. Leun je bijvoorbeeld sterk naar voren, dan is een klein duwtje genoeg om je uit evenwicht te brengen. Naast de beslissing om al dan niet in te grijpen, moet het exoskelet ook bepalen hoe het gaat ingrijpen. Hierbij probeert het exoskelet het evenwicht van de mens te herstellen zoals een mens zonder exoskelet dat zou doen. Indien iemand zijn evenwicht dreigt te verliezen, zal hij bijvoorbeeld sneller een stap zetten dan zich te bukken om zijn stabiliteit te verhogen. Door hiermee rekening te houden werkt het exoskelet de mens niet tegen en voelt ook deze corrigerende actie natuurlijk aan voor de mens.
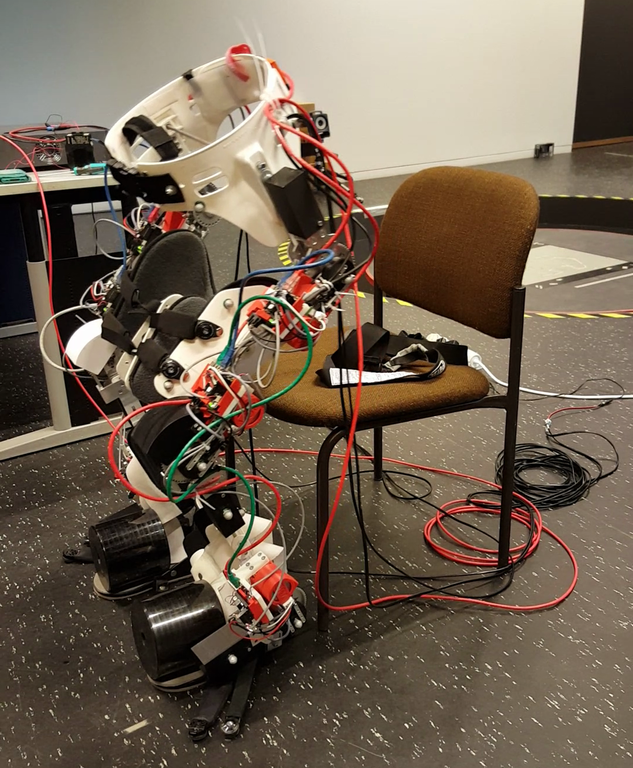
Wetenschappelijke principes zijn altijd mooi op papier, maar dienen experimenteel gevalideerd te worden. Jij bent ongetwijfeld geen kandidaat om een ongeteste elektrische broek aan te trekken. Bij dergelijke experimenten is de repeteerbaarheid primordiaal, zodat de situatie met en zonder exoskelet met elkaar te vergelijken zijn. Daarom wordt hier het evenwicht van de proefpersoon steeds op een repeteerbare wijze verstoord met behulp van een slinger die (gedempt!) tegen zijn rug botst. Vervolgens wordt geanalyseerd hoe de proefpersoon hierop reageert. Alvorens te experimenteren is het zeer belangrijk om het exoskelet af te stellen op de proefpersoon. Voor een zwaardere persoon zal het exoskelet immers meer kracht moeten leveren om de persoon in evenwicht te houden. Uit de experimenten blijkt dat het exoskelet de mens zoals gewenst een duwtje in de goede richting geeft wanneer hij zijn evenwicht dreigt te verliezen. De mens heeft zo veel minder moeite met het behouden van zijn evenwicht.
Beeld je in dat je een kind moet leren fietsen. In het begin zal je de fiets van je kind nog permanent vasthouden, maar na verloop van tijd zal het kind meestal alleen fietsen terwijl jij erachteraan loopt. Je zal dan permanent de afweging moeten maken tussen ingrijpen of niet. Te vroeg ingrijpen zal het ongenoegen van je kleine spruit opwekken, terwijl een laattijdig ingrijpen een schram tot gevolg heeft. Het exoskelet gebruikt een vergelijkbare strategie. Ook het exoskelet moet inschatten of de mens in staat zal zijn om zelfstandig zijn evenwicht te behouden. Eenmaal het antwoord hierop nee is, zal het exoskelet overspringen naar een corrigerende modus en de mens volledig terughelpen naar evenwicht, net zoals jij dat doet met het fietsende kind. Deze studie toont het potentieel aan van deze evenwichtsstrategie op basis van experimenten vanuit stilstand. In de toekomst zal deze evenwichtsstrategie uitgebreid worden naar stappen, wandelen, trappen nemen en nog zo veel meer. En wie weet, misschien zal jij daarvan ooit wel eens de vruchten mogen plukken.
Bibliografie
[1] J. Englsberger, C. Ott, M. a. Roa, A. Albu-Schäffer, and G. Hirzinger, “Bipedal walking control based on capture point dynamics,” IEEE International Conference on Intelligent Robots and Systems, pp. 4420–4427, 2011.
[2] C. Kisner and L. A. Colby, Therapeutic Exercise: Foundtion and Techniques. F.A. Davis, 6 ed., 2012.
[3] S. Park, F. B. Horak, and A. D. Kuo, “Postural feedback responses scale with biomechanical constraints in human standing,” Experimental Brain Research, vol. 154, no. 4, pp. 417–427, 2004.
[4] S. Kim, C. G. Atkeson, and S. Park, “Perturbation-dependent selection of postural feedback gain and its scaling,” Journal of Biomechanics, vol. 45, no. 8, pp. 1379–1386, 2012.
[5] VTM NIEUWS, “Marieke stapt voor het eerst in 15 jaar,”. http://nieuws.vtm. be/binnenland/155908-marieke-stapt-voor-het-eerst-15-jaar (Bezocht op 2016-04-09).
[6] L. Alsteens and De Standaard, “Bionisch pak geeft verlamden ook mentale boost,”. http://www.standaard.be/cnt/dmf20160308_02172052 (Bezocht op 2016-04-09).
[7] HLN.be, “Tests met exoskelet leveren spectaculair resultaat op voor verlamde mensen,”. http://www.hln.be/hln/nl/961/Wetenschap/article/detail/2640045/2016/03/… Tests-met-exoskelet-leveren-spectaculair-resultaat-op-voor-verlamde-mensen.dhtml (Bezocht op 2016-04-09).
[8] VTM Telefacts, “En toen wandelde Marc Herremans weer. . . ,”. http://vtm.be/telefacts/en-toen-wandelde-marc-herremans-weer (Bezocht op 2016-04-09).
[9] Centers for Disease Control and Prevention, “Important Facts about Falls | Home and Recreational Safety | CDC Injury Center.”. http://www.cdc.gov/homeandrecreationalsafety/falls/adultfalls.html (Bezocht op 2016-01-18).
10] B. J. Vellas, S. J. Wayne, L. J. Romero, R. N. Baumgartner, and P. J. Garry, “Fear of falling and restriction of mobility in elderly fallers.,” Age and ageing, vol. 26, no. 3, pp. 189–93, 1997.
[11] J. a. Stevens, P. S. Corso, E. a. Finkelstein, and T. R. Miller, “The costs of fatal and non-fatal falls among older adults.,” Injury prevention : journal of the International Society for Child and Adolescent Injury Prevention, vol. 12, no. 5, pp. 290–295, 2006.
[12] “Mirad.”. http://www.mirad-sbo.be/ (Bezocht op 2016-03-26).
[13] Rewalk Robotics, “New ReWalkTM Personal 6.0 - ReWalk – More Than Walking.”. http://rewalk.com/rewalk-personal-3/ (Bezocht op 2015-12-31).
[14] Ekso Bionics, “Ekso Bionics - Exoskeleton, wearable robot for people with paralysis from SCI or stroke.”. http://intl.eksobionics.com/ekso (Bezocht op 2015-12-31).
[15] Rex Bionics, “Rex Bionics - Step into the Future.”. http://www.rexbionics. com/ (Bezocht op 2015-12-31).
[16] P. D. Neuhaus, J. H. Noorden, T. J. Craig, T. Torres, J. Kirschbaum, and J. E. Pratt, “Design and evaluation of Mina: A robotic orthosis for paraplegics,” in IEEE International Conference on Rehabilitation Robotics, pp. 1–8, 2011.
[17] K. Low, X. L. X. Liu, and H. Y. H. Yu, “Development of NTU wearable exoskeleton system for assistive technologies,” IEEE International Conference Mechatronics and Automation, 2005, vol. 2, no. July, pp. 1099–1106, 2005.
[18] D. Li and H. Vallery, “Gyroscopic assistance for human balance,” 2012 12th IEEE International Workshop on Advanced Motion Control (AMC), pp. 1–6, 2012.
[19] B. Graf, M. Hans, and R. D. Schraft, “Care-O-bot II - Development of a Next Generation Robotic Home Assistant,” Autonomous Robots, vol. 16, no. 2, pp. 193–205, 2004.
[20] H. Vallery, A. Bögel, C. O’Brien, and R. Riener, “Cooperative Control Design for Robot-Assisted Balance During Gait,” at - Automatisierungstechnik, vol. 60, no. 11, pp. 715–720, 2012.
[21] H. Vallery, P. Lutz, J. von Zitzewitz, G. Rauter, M. Fritschi, C. Everarts, R. Ronsse, a. Curt, and M. Bolliger, “Multidirectional Transparent Support for Overground Gait Training,” Proceedings of IEEE International Conference on Rehabilitation Robotics, pp. 1–7, 2013.
[22] Fraunhofer IPA, “Care-O-bot 4.”. http://www.care-o-bot-4.de/ (Bezocht op 2015-12-31).
[23] A. L. Hof, “The ’extrapolated center of mass’ concept suggests a simple control of balance in walking,” Human Movement Science, vol. 27, no. 1, pp. 112–125, 2008.
[24] S.-h. Hyon, J. G. Hale, G. Cheng, and S. Member, “Full-Body Compliant Human – Humanoid Interaction : Balancing in the Presence of Unknown External Forces,” IEEE TRANSACTIONS ON ROBOTICS, vol. 23, no. 5, pp. 884–898, 2007.
[25] P. Sardain and G. Bessonnet, “Forces acting on a biped robot. Center of pressure-zero moment point,” IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans, vol. 34, no. 5, pp. 630–637, 2004.
[26] J. Pratt, J. Carff, S. Drakunov, and A. Goswami, “Capture point: A step toward humanoid push recovery,” Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, HUMANOIDS, pp. 200–207, 2006.
[27] O. E. Ramos, N. Mansard, and P. Soueres, “Whole-body motion integrating the capture point in the operational space inverse dynamics control,” in 14th IEEE-RAS International Conference on Humanoid Robots, pp. 707–712, 2014.
[28] A. Sherikov, D. Dimitrov, and P.-b. Wieber, “Whole body motion controller with long-term balance constraints,” Humanoids2014, 2014.
[29] H. Herr and M. Popovic, “Angular momentum in human walking.,” The Journal of experimental biology, vol. 211, no. Pt 4, pp. 467–481, 2008.
[30] A. L. Hof, “The equations of motion for a standing human reveal three mechanisms for balance,” Journal of Biomechanics, vol. 40, no. 2, pp. 451–457,2007.
[31] C. F. Runge, C. L. Shupert, F. B. Horak, and F. E. Zajac, “Ankle and hip postural strategies defined by joint torques,” Gait and Posture, vol. 10, no. 2, pp. 161–170, 1999.
[32] P. Gatev, S. Thomas, T. Kepple, and M. Hallett, “Feedforward ankle strategy of balance during quiet stance in adults,” Journal of Physiology, vol. 514, no. 3, pp. 915–928, 1999.
[33] B. E. Maki and W. E. McIlroy, “The role of limb movements in maintaining upright stance: the "change-in-support"strategy.,” Physical therapy, vol. 77, no. 5, pp. 488–507, 1997.
[34] C. D. MacKinnon and D. a. Winter, “Control of whole body balance in the frontal plane during human walking,” Journal of Biomechanics, vol. 26, no. 6, pp. 633–644, 1993.
[35] C. E. Bauby and A. D. Kuo, “Active control of lateral balance in human walking,” Journal of Biomechanics, vol. 33, pp. 1433–1440, Nov. 2000.
[36] B. L. Riemann, “Is there a link between chronic ankle instability and postural instability?,” Journal of Athletic Training, vol. 37, no. 4, pp. 386–393, 2002.
[37] J. L. McKay and L. H. Ting, “Optimization of muscle activity for task-level goals predicts complex changes in limb forces across biomechanical contexts,” PLoS Computational Biology, vol. 8, no. 4, 2012.
[38] M. Afschrift, F. De Groote, and F. Jonkers, “A feedback controller to predict the postural control in response to a perturbation,” XXIV Congress of the International Society of Biomechanics (ISB), Glasgow, July 12-16, 2015.
[39] L. H. Ting, K. W. Van Antwerp, J. E. Scrivens, J. L. McKay, T. D. J. Welch, J. T. Bingham, and S. P. DeWeerth, “Neuromechanical tuning of nonlinear postural control dynamics,” Chaos, vol. 19, no. 2, 2009.
[40] M. Afschrift, F. De Groote, J. De Schutter, and I. Jonkers, “The effect of muscle weakness on the capability gap during gross motor function: a simulation
study supporting design criteria for exoskeletons of the lower limb.,” Biomedical engineering online, vol. 13, no. 1, p. 111, 2014.
[41] K. Tanghe, J. De Schutter, E. Aertbeliën, and F. De Groote, “Assistentie-zoals-nodig voor assistieve robottoestellen, gebaseerd op re altime berekeningen van het capaciteitstekort..”. https://www.kuleuven.be/onderzoek/onderzoeksdatabank/project/3E14/3E140… (Bezocht op 2016-04-05).
[42] N. Thatte and H. Geyer, “Toward Balance Recovery with Leg Prostheses using Neuromuscular Model Control.,” IEEE Transactions on Biomedical Engineering, vol. PP, no. 99, p. 1, 2015.
[43] P. Soetens, “RTT: Real-Time Toolkit.”. http://www.orocos.org/rtt (Bezocht op 2016-05-13).
[44] K. Tanghe, A. Harutyunyan, E. Aertbeliën, F. D. Groote, J. D. Schutter, P. Vrancx, and A. Nowé, “Predicting Seat-Off and Detecting Start-of-Assistance Events for Assisting Sit-to-Stand With an Exoskeleton,” IEEE Robotics and Automation Letters, vol. 1, no. 2, pp. 792–799, 2016.
[45] H. J. Ferreau, C. Kirches, A. Potschka, H. G. Bock, and M. Diehl, “qpOASES: a parametric active-set algorithm for quadratic programming,” Mathematical Programming Computation, vol. 6, no. 4, pp. 327–363, 2014.
[46] M. Afschrift, I. Jonkers, J. De Schutter, and F. De Groote, “Mechanical effort predicts the selection of ankle over hip strategies in non-stepping postural responses [In Review],” Journal of Neurophysiology, 2016.
[47] S. L. Delp, J. P. Loan, and M. G. Hoy, “An interactive graphics-based model of the lower extremity to study orthopedic surgical procedures,” IEEE transactions on Biomedical Engineering, vol. 37, no. 8, pp. 757–767, 1990.








