
Automation of an adhesive application by using a robot
De industrie evolueert naar een industrie 4.0 met een nadruk op intelligente machines, waarbij artificial intelligence de efficiëntie van productielijnen wenst te verbeteren. Deze studie tracht met behulp van machinevisie, een deelgebied van artificial intelligence, de uniformiteit en de uithardingstoestand van een lijmverbinding te bepalen. De uithardingstoestand van de lijm kan hierbij afgeleid worden uit de kleur van de lijm, vermits deze wijzigt naarmate de lijm uithardt. Echter, om de resultaten van verschillende proefstukken objectief met elkaar te kunnen vergelijken, dient het lijmproces geautomatiseerd te verlopen. Hiervoor wordt gebruikt gemaakt van een lijmunit in combinatie met een robot, waarbij representatieve proefstukken bestaande uit een lijmverbinding tussen aluminium en plexiglazen platen geproduceerd worden.
Opzetten van de communicatie
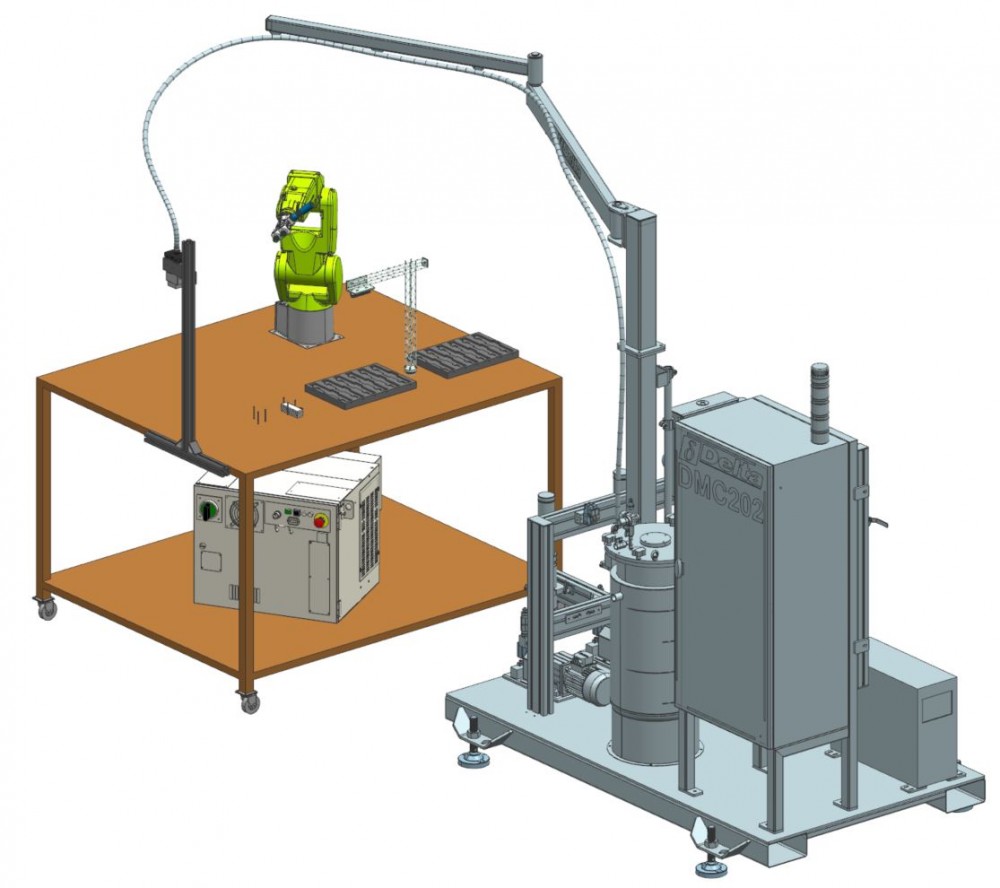
De communicatie tussen de robot en de lijmunit dient opgezet te worden. Hierdoor worden zowel de noodstoppen van de beide machines gesynchroniseerd, waarnaast tevens de mogelijkheid aan de robot toegereikt wordt om een extrusieverzoek te sturen naar de lijmunit. Daarnaast is er in dit onderzoek gekozen om de plexiglazen platen met behulp van de robot naar de lijmdispenser te brengen, welke een bijkomend voordeel met zich meebrengt dat de verlijmde proefstukken tevens gestockeerd kunnen worden.
Voor het opnemen van de plexiglazen platen wordt gebruik gemaakt van een vacuümgrijper, aangezien deze de mogelijkheid bezit om de platen op één zijde vast te nemen, dit in tegenstelling tot conventionele grijpers waarbij gebruik gemaakt wordt van minstens twee zijden. Hierdoor blijft de keerzijde van de plexiglazen plaat volledig vrij, waardoor de flexibiliteit van de toepassing toeneemt.
Gebruik makend van deze componenten en connecties kon de praktische uitwerking voor het produceren van representatieve samples vervolledigd worden. Het was echter nog niet mogelijk om reeds proefstukken te produceren aangezien er slechts één persluchtaansluiting voorhanden was, terwijl zowel de lijmunit als de robot gelijktijdig van perslucht voorzien moet worden. Daarnaast werd tevens vastgesteld dat de mixeenheid bij de lijmdispenser tijdens het verstrekken van lijm grote afwijkingen ondervond. Dit kon echter vrij snel opgelost worden met een gefixeerde ring rond de mixeenheid, doch werd dit uitgesteld aangezien de productie nog niet kon aanvatten vanwege de enkele persluchtaansluiting.
Kwaliteitscontrole
Daarnaast dient een camera gemonteerd te worden die oordeelt over de kwaliteit van de verlijming van de proefstukken. Aangezien de resolutie van de camera te laag is om een kwaliteitscontrole uit te voeren indien deze gemonteerd is boven de robot zijn werkzone, is ervoor gekozen om de camera met behulp van een draaiende constructie te monteren in de robot zijn werkzone. Met deze opstelling is het bijgevolg mogelijk om de kwaliteit van de ene batch werkstukken te controleren terwijl de robot een andere batch produceert.
Voor het effectieve programmeerwerk werd uiteindelijk besloten om de Fanuc TeachPendant te gebruiken. Deze programmeeromgeving heeft echter als nadeel dat deze geen geïntegreerde mogelijkheid biedt om een Python script in te laden, waardoor een externe Raspberry Pi gebruikt wordt om visiemogelijkheden te verkrijgen.
De COVID-19 uitbraak zorgde er echter voor dat bepaalde componenten zoals de roterende constructie niet meer vervaardigd konden worden. Hierdoor werd besloten om de kwaliteitscontrole conceptueel verder uit te werken, hetgeen inhoudt dat de setup gemodelleerd wordt in een CAD omgeving en dat bepaalde connecties beschreven worden. Helaas was de mixeenheid nog niet gefixeerd op het moment dat de restrictie tot de KU Leuven campus te Brugge ingevoerd werd, waardoor er amper proefstukken beschikbaar waren voor de verdere implementatie van het visiealgoritme. Daarnaast bleek de kleurverandering doorheen de uithardingsperiode van de lijm amper kwantificeerbaar uit de analyse van de beschikbare proefstukken.
Conclusie
Er kan geconcludeerd worden dat deze opstelling alle capaciteiten bezit om representatieve proefstukken te produceren na de fixatie van de mixeenheid. De kwaliteitscontrole daarentegen kan bij deze lijm nog niet ingezet worden, aangezien de kleurverandering doorheen de uithardingsperiode van de lijm niet eenduidig vastgelegd kon worden.
Bibliografie
[1] L. F. M. da Silva, A. O¨ chsner, and R. D. Adams, “1 - Introduction to adhesive bonding
technology,” in Handbook of Adhesion Technology: Second Edition, 2018, vol. 1, ch. 1, pp.
1–8. [Online]. Available: http://link.springer.com/10.1007/978-3-319-55411-2
[2] ——, “38 - Equipment for adhesive bonding,” in Handbook of Adhesion Technology:
Second Edition, 2018, vol. 2, ch. 38, pp. 1091–1116. [Online]. Available: http:
//link.springer.com/10.1007/978-3-319-55411-2
[3] S. Ebnesajjid, “7 - Joint design,” in Adhesives technology handbook: 2nd edition, 2nd ed.,
2009, ch. 7, pp. 159–182.
[4] L. F. M. da Silva, “1 - Simple lap joint geometry,” in Modeling of Adhesively Bonded Joints,
1st ed. Berlin, Heidelberg : Springer Berlin Heidelberg : Imprint Springer,, 2008, ch. 1, pp.
3–24.
[5] L. F. M. da Silva, A. O¨ chsner, and R. D. Adams, “27 - Design rules and methods to improve
joint strength,” in Handbook of Adhesion Technology: Second Edition, 2018, vol. 1, ch. 27,
pp. 773–810. [Online]. Available: http://link.springer.com/10.1007/978-3-319-55411-2
[6] P. Li, Z. Fu, and Y. Zhao, “An industrial robot for thin-type space solar cells bonding,” Industrial
Robot, vol. 37, no. 2, pp. 185–192, 2010.
[7] R. Meyes, H. Tercan, S. Roggendorf, T. Thiele, C. B¨uscher, M. Obdenbusch,
C. Brecher, S. Jeschke, and T. Meisen, “Motion Planning for Industrial Robots using
Reinforcement Learning,” Procedia CIRP, vol. 63, pp. 107–112, 2017. [Online]. Available:
http://dx.doi.org/10.1016/j.procir.2017.03.095
[8] (Organization/Institution) Schmalz, “Vacuum Ejectors.” [Online]. Available:
https://www.schmalz.com/en/vacuum-knowledge/the-vacuum-system-and-its-c…
vacuum-generators/vacuum-ejectors
[9] (Organization/Institution) Robotics Fanuc, “FANUC Robot series R-30iB Mate CONTROLLER
Maintenance Manual,” p. 298, 2006.
[10] H. Zghair, A. Ali, and I. Ali, “Effective performance analysis of industrial robotics for automated
manufacturing system,” Proceedings of the International Conference on Industrial Engineering
and Operations Management, vol. 2017, no. JUL, pp. 960–970, 2017.
[11] (Organization/Institution) Delta Application Technics, “DMC202 wiring circuits,” Ophasselt
Belgi ¨ e, Tech. Rep., 2019.
[12] (Organization/Institution) Raspberry Pi, “GPIO - Raspberry Pi Documentation.” [Online].
Available: https://www.raspberrypi.org/documentation/usage/gpio/
[13] G. Atti, “Lean management,” in Quality Management: Tools, Methods and Standards. Emerald
Group Publishing Ltd., 2019, ch. 9, pp. 129–151.
[14] (Organization/Institution) KU Leuven, “Processing Polymers & Lightweight Structures –
Propolis,” 2017. [Online]. Available: https://iiw.kuleuven.be/onderzoek/propolis
[15] S. Wu, Polymer interface and adhesion. New York (N.Y.) : Dekker, 1982.
[16] S. Ebnesajjid, “1 - Introduction and adhesion theories,” in Adhesives technology handbook:
2nd edition, 2nd ed., 2009, ch. 1, pp. 1–17.
[17] J. Cust´odio, “16 - Structural Adhesives,” in Materials for Construction and Civil
Engineering: Science, Processing, and Design, M. C. Gonc¸alves and F. Margarido, Eds.
Cham: Springer International Publishing, 2015, ch. 16, pp. 717–771. [Online]. Available:
https://doi.org/10.1007/978-3-319-08236-3f g16
[18] J. D. Miller and H. Ishida, “10 - Adhesive-Adherend Interface and Interphase,” in
Fundamentals of Adhesion, L.-H. Lee, Ed. Boston, MA: Springer US, 1991, ch. 10, pp.
291–324. [Online]. Available: https://doi.org/10.1007/978-1-4899-2073-7f g10
[19] C. A. Harper, Handbook of plastics and elastomers. New York (N.Y.) : MacGraw-Hill,, 1975.
[20] T. V. Lapitskaya, V. A. Lapitskii, M. D. Kucheneva, and A. V. Lapitskii, “New trends in creation
of epoxy adhesives,” Polymer Science - Series D, vol. 7, no. 1, pp. 30–32, 2014.
[21] S. Ebnesajjid, “5 - Characteristics of adhesive materials,” in Adhesives technology handbook:
2nd edition, 2nd ed., 2009, ch. 5, pp. 63–136.
[22] L. F. M. da Silva, A. O¨ chsner, and R. D. Adams, “18 - Thermal properties of adhesives,”
in Handbook of Adhesion Technology: Second Edition, 2018, vol. 1, ch. 18, pp. 459–488.
[Online]. Available: http://link.springer.com/10.1007/978-3-319-55411-2
[23] L. F. da Silva, A. O¨ chsner, and R. D. Adams, “12 - Classification of adhesive and sealant
materials,” in Handbook of Adhesion Technology: Second Edition, 2018, vol. 1, ch. 12, pp.
283–318. [Online]. Available: http://link.springer.com/10.1007/978-3-319-55411-2
[24] C. Prisacariu, Polyurethane Elastomers: From Morphology to Mechanical Aspects, 1st ed.
Vienna : Springer Vienna : Imprint Springer,, 2011.
[25] E. Sharmin and F. Zafar, “1 - Polyurethane: An Introduction,” 2012, ch. 1, pp. 3–16.
[26] (Organization/Institution) HowStuffWorks.com Contributors, “What are some uses for
polyurethane adhesives?” 2011. [Online]. Available: https://home.howstuffworks.com/
uses-for-polyurethane-adhesives.htm
[27] S. M. Guillaume, “Advances in the synthesis of silyl-modified polymers (SMPs),” Polymer
Chemistry, vol. 9, no. 15, pp. 1911–1926, 2018.
[28] L. F. M. da Silva, A. O¨ chsner, and R. D. Adams, “37 - Preparation for bonding,” in Handbook
of Adhesion Technology: Second Edition, 2018, vol. 2, ch. 37, pp. 1051–1090. [Online].
Available: http://link.springer.com/10.1007/978-3-319-55411-2
[29] S. Ebnesajjid, “3 - Material surface preparation techniques,” in Adhesives technology handbook:
2nd edition, 2nd ed., 2009, ch. 3, pp. 37–46.
[30] L. F. M. da Silva, A. O¨ chsner, and R. D. Adams, “7 - General introduction to surface
treatments,” in Handbook of Adhesion Technology: Second Edition, 2018, vol. 1, ch. 7, pp.
131–162. [Online]. Available: http://link.springer.com/10.1007/978-3-319-55411-2
[31] S. Ebnesajjad, “5 - Material Surface Preparation Techniques,” in Plastics Design Library,
S. B. T. H. o. A. Ebnesajjad and S. Preparation, Eds. Oxford: William Andrew
Publishing, 2011, pp. 49–81. [Online]. Available: http://www.sciencedirect.com/science/
article/pii/B9781437744613100057
[32] (Organization/Institution) RobotWorx, “RobotWorx - Grippers For Robots.” [Online]. Available:
https://www.robots.com/articles/grippers-for-robots
[33] (Organization/Institution) Robotics Online Marketing Team, “Is a Vacuum
Gripper Right for Your Collaborative Robot Application? — RIA
Robotics Blog,” 2019. [Online]. Available: https://www.robotics.org/blog-article.cfm/
Is-a-Vacuum-Gripper-Right-for-Your-Collaborative-Robot-Application/134
[34] M. B´elanger-Barrette, “Is the Robotiq Gripper Collaborative?” 2018. [Online]. Available:
https://blog.robotiq.com/is-the-robotiq-gripper-collaborative
[35] Z. Yang, Y. An, Y. Sun, and J. Zhang, “Research on Intelligent Glue-coating Robot Based on
Visual Servo,” Physics Procedia, vol. 24, pp. 2165–2171, 2012.
[36] L. Sun, H. Xie, W. Rong, and L. Chen, “Vision based integrated system for automated anodic
bonding of MEMS sensors,” 2005 6th International Conference on Electronics Packaging
Technology, vol. 2005, pp. 0–4, 2005.
[37] P. Heleno, R. Davies, B. A. Brazio Correia, and J. Dinis, “A machine vision quality control
system for industrial acrylic fibre production,” Eurasip Journal on Applied Signal Processing,
vol. 2002, no. 7, pp. 728–735, 2002.
[38] J. Y. Kim, “CAD-based automated robot programming in adhesive spray systems for shoe
outsoles and uppers,” Journal of Robotic Systems, vol. 21, no. 11, pp. 625–634, 2004.
[39] (Organization/Institution) Robotics Fanuc, “FANUC Robot series CR-4A, CR-7A, CR-7A/L,
CR-14A/L Operator’s manual,” p. 158, 2017.
[40] ——, “Smart safety saves you space and money,” p. 2.
[41] (Organization/Institution) Schmalz, “Vacuum Area Gripping Systems FXCB >
Area Gripping Systems and End Effectors — Schmalz.” [Online]. Available:
https://www.schmalz.com/en/vacuum-technology-for-automation/vacuum-comp…
area-gripping-systems-and-end-effectors/vacuum-area-gripping-systems-fxcb-fmcb/
vacuum-area-gripping-systems-fxcb
[42] ——, “Area Gripping Systems FX-SW > Area Gripping Systems
and End Effectors — Schmalz.” [Online]. Available: https:
//www.schmalz.com/en/vacuum-technology-for-automation/vacuum-components/
area-gripping-systems-and-end-effectors/vacuum-area-gripping-systems-fx-fm/
area-gripping-systems-fx-sw
[43] ——, “Vacuum End Effectors VEE.” [Online]. Available: https:
//www.schmalz.com/en/vacuum-technology-for-automation/vacuum-components/
area-gripping-systems-and-end-effectors/vacuum-end-effectors-vee/
[44] (Organization/Institution) Unigripper, “UniGripper Co/Light - Light-Weight Gripper with
Impressive Strenght for Collaborative Robots.” [Online]. Available: https://www.unigripper.
com/en/colight.html
[45] J. H. Spurk, Fluid Mechanics., 3rd ed. Cham: Springer International Publishing AG, 2008.
[46] (Organization/Institution) Intel, “Depth Camera D415 – Intel® RealSense™ Depth and
Tracking Cameras.” [Online]. Available: https://www.intelrealsense.com/depth-camera-d415/
[47] S. Prototyping and F. O. R. Business, “The Stratasys F123 Series The Stratasys F123 Series,”
pp. 0–1.
[48] M. Bates, “9 - Input Sensors,” in Interfacing PIC Microcontrollers, 2nd ed. Newnes,
2014, pp. 299–332. [Online]. Available: https://www.sciencedirect.com/science/article/pii/
B9780080993638000091
[49] (Organization/Institution) Clearpath Robotics, “UR ROS Setup — UR Setup Tutorial
0.0.0 documentation.” [Online]. Available: https://www.clearpathrobotics.com/assets/guides/
ur/urf gsetup/ros.html
[50] (Organization/Institution) RoboDK, “Robot Programs - RoboDK Documentation.” [Online].
Available: https://robodk.com/doc/en/Robot-Programs.htmlf#gRobotProgram
[51] (Organization/Institution) Fanuc, “Robust ROBOGUIDE Simulation Software —
FANUC America.” [Online]. Available: https://www.fanucamerica.com/products/robots/
robot-simulation-software-FANUC-ROBOGUIDE
[52] ——, “Educational package - Technical Documentation : ER-4iA Robot with R-30 i B Mate
Plus Controller,” p. 66.
[53] (Organization/Institution) OpenCV, “Image Processing — OpenCV 2.4.13.7 documentation.”
[Online]. Available: https://docs.opencv.org/2.4/modules/imgproc/doc/imgproc.






