
UAntwerp Solar Boat Team onderzoekt innovatieve simulatie voor regelsysteem voor hydrofoilboot
Het UAntwerp Solar Boat Team, bestaande uit 21 studenten industriële wetenschappen aan de Universiteit Antwerpen, heeft een innovatieve methode uitgewerkt in de ontwikkeling van hydrofoilboten. Dit team racet elk jaar in internationale competities om hun ontwikkelingen op te meten tegen andere universiteiten. Het team presenteert met trots hun vernieuwende methode om elektronische regelsystemen te ontwikkelen.
Hydrofoilen, waarbij men een boot boven het wateroppervlak heft door gebruik te maken van draagvleugels, is een technologie die de laatste jaren aan populariteit wint. Het UAntwerp Solar Boat Team is deze technologie aan het implementeren.
De bachelorproef, uitgevoerd door Mattijs Devlieghere, heeft zich gericht op het ontwerpen van een elektronisch regelsysteem voor een met motor gestuurd hydrofoilsysteem. Het onderzoek omvatte het inlezen en filteren van sensordata, de ontwikkeling van de software en hardware van het regelsysteem, het bepalen van de parameters en het implementeren van veiligheidsmaatregelen.
Een belangrijk aspect van het regelsysteem is het gebruik van ultrasone sensoren en een gyroscoop als inputs voor de regelaar. Deze sensoren geven informatie over de positie en de bewegingen van de boot, waardoor het regelsysteem in staat is om de hydrofoils nauwkeurig aan te sturen.
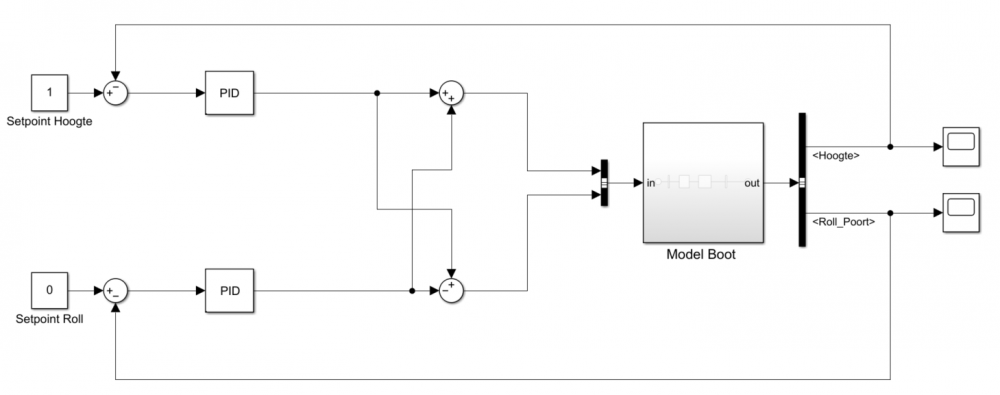
Een hoogtepunt van het onderzoek was de toepassing van PID-regelaars in combinatie met co-simulatie door middel van Siemens NX Motion en Simulink. Deze methode om regelaars in te stellen door middel van een 3D-model, waarbij dit vroeger doormiddel van wiskundige formules moest gebeuren. Hoewel de huidige implementatie instabiel bleek, gelooft het team in de kracht van co-simulatie.
Met deze bevindingen heeft het UAntwerp Solar Boat Team de deur geopend naar een nieuw tijdperk van efficiëntie en duurzaamheid.

Bibliografie
[1] A. R. Quinteros-Condoretty, S. R. Golroudbary, L. Albareda, B. Barbiellini, and A. Soyer, “Impact of circular design of lithium-ion batteries on supply of lithium for electric cars towards a sustainable mobility and energy transition,” Procedia CIRP, vol. 100, pp. 73–78, 1 2021. 1
[2] H. Babinsky, “How do wings work?” 2003. [Online]. Available: www.iop.org/journals/ physed 1
[3] B. Liu, X. Xu, D. Pan, and X. Wang, “Research on shipping energy-saving technology: Hydrofoil amphibious vehicle driven by waterjet propulsion,” Journal of Cleaner Production, vol. 382, p. 135257, 1 2023. 2
[4] M. Graf, “Mbs model for control and optimization of a hydrofoil boat,” PAMM, vol. 20, 1 2021. 2
[5] J. R. Meyer and J. J. R. Wilkings, “Hydrofoil development and applications,” Tech. Rep., 6 1992. 2, 3, 4, 12
[6] “Monaco statistics,” 8 2015. [Online]. Available: https://nl.wisuki.com/statistics/7648/ monaco 2
[7] “Toughsonic® general purpose series ultrasonic distance sensors pc configurable and/or push-button teachable installation and operating instructions for toughsonic 3 toughsonic 12 toughsonic 14 toughsonic 30 toughsonic 50 senix corporation,” 2020. [Online]. Available: https://senix.com/senixview-ultrasonic-sensor-software/ 5
[8] I. Beavers, “Rarely asked questions - 139, the case of the misguided gyro,” AnalogDialogue, Tech. Rep., 2017. 6
[9] “Bno055 intelligent 9-axis absolute orientation sensor,” Bosh Sensortec, Tech. Rep., 2014. 6
[10] N. Anna, “Arduino uno vs mega vs due: The differences | all3dp,” 2020. [Online]. Available: https://all3dp.com/2/arduino-mega-vs-uno-vs-due-differences/ 7
[11] Z. Peterson, “8-bit vs. 32-bit mcu: Choosing the right microcontroller for your pcb design | altium.com,” 2 2017. [Online]. Available: https://resources.altium.com/p/ 8-bit-vs-32-bit-mcu-choosing-right-microcontroller-your-pcb-design 7
[12] T. Hägglund, “Signal filtering in pid control,” Ph.D. dissertation, 3 2012. 7
[13] K. J. Åström and T. Hägglund, Advanced PID control. ISA-The Instrumentation, Systems, and Automation Society, 2006. 7
[14] “Low-pass filter,” 7 2022. [Online]. Available: https://github.com/curiores/ ArduinoTutorials/tree/main/BasicFilters/ArduinoImplementations/LowPass/LowPass2. 0 7
[15] “State-space models - matlab & simulink.” [Online]. Available: https://nl.mathworks. com/discovery/state-space.html 10 18 | Bachelorproef Bibliografie
[16] Z. Chen and E. N. Brown, “State space model,” p. 30868, 2013. 10
[17] “What is open-loop vs closed-loop - xeryon.” [Online]. Available: https://xeryon.com/ technology/what-is-open-loop-vs-closed-loop/ 11
[18] M. Okasha, J. Kralev, and M. Islam, “Design and experimental comparison of pid, lqr and mpc stabilizing controllers for parrot mambo mini‐drone,” Aerospace, vol. 9, p. 298, 6 2022. [Online]. Available: https://www.mdpi.com/2226-4310/9/6/298/htmhttps: //www.mdpi.com/2226-4310/9/6/298 12
[19] R. Tomaz, T. Carreira, and S. Amaro, “Hydrofoil design and optimization for a solar powered boat,” Ph.D. dissertation, 2021. 12, 17
[20] T. Putranto and A. Sulisetyono, “Lift-drag coefficient and form factor analyses of hydrofoil due to the shape and angle of attack,” International Journal of Applied Engineering Research, vol. 12, pp. 11 152–11 156, 2017. [Online]. Available: http://www.ripublication.com 12
[21] “Open pid tuner - matlab & simulink - mathworks benelux.” [Online]. Available: https: //nl.mathworks.com/help/slcontrol/ug/designing-controllers-with-the-pid-tuner.html 13
[22] “Choose a control design approach - matlab & simulink - mathworks benelux.” [Online]. Available: https://nl.mathworks.com/help/slcontrol/ug/ choosing-a-compensator-design-approach.html 13
[23] “Frequency-response based tuning.” [Online]. Available: https://nl.mathworks.com/help/ slcontrol/ug/frequency-response-based-tuning-basics.html 13
[24] J. Kennedy and R. Eberhart, “Particle swarm optimization,” Proceedings of ICNN’95 - International Conference on Neural Networks, vol. 4, pp. 1942–1948, 11 1995. [Online]. Available: http://ieeexplore.ieee.org/document/488968/ 14
[25] A. Tam, “A gentle introduction to particle swarm optimization,” 10 2021. [Online]. Available: https://machinelearningmastery.com/ a-gentle-introduction-to-particle-swarm-optimization/ 14
[26] M. K. Heris, “Video tutorial of pso implementation in matlab,” 2016. [Online]. Available: https://yarpiz.com/440/ ytea101-particle-swarm-optimization-pso-in-matlab-video-tutorial 14
[27] W. E. Farris, D. R. Stark, and C. T. Ray, “Hydrofoil ship control and dynamics specifications and criteria,” The Boeing Company, Tech. Rep., 1977. 16






