
Robotchirurgie: de weg naar minimaal invasieve hartoperaties
- GianniBorghesan
Bypass operaties
Traditioneel zijn 'coronary artery bypass graftings (CABGs)', beter bekend als 'bypass operaties' invasieve procedures waarvan een incisie in de borstkas een cruciaal deel uitmaakt. Technologische ontwikkelingen de voorbije decennia hebben de stand van zaken gebracht tot het punt waar men met behulp van een chirurgisch robotsysteem het grootste deel van de procedure minimaal invasief kan uitvoeren, ware het een kijkoperatie. Op een zeker punt is het echter nog steeds onoverkomelijk dat een opening wordt gemaakt. Deze verleent de chirurg toegang tot het hart, waarna hij het mechanisch stabiliseert en de kransslagader naait.
Nut van een bewegingscompensatiesysteem
En dit is waar een bewegingscompensatiesysteem een cruciale rol kan opeisen. Gegeven dergelijk systeem, dat de beweging van het hart op robuuste en accurate wijze schat en compenseert, wordt de incisie overbodig en kan de volledige procedure als kijkoperatie worden uitgevoerd. Bijgevolg wordt het ongemak van een bypass procedure gereduceerd naar dat bijhorende het operatief verwijderen van de wijsheidstanden.
Ontwerp en ontwikkeling
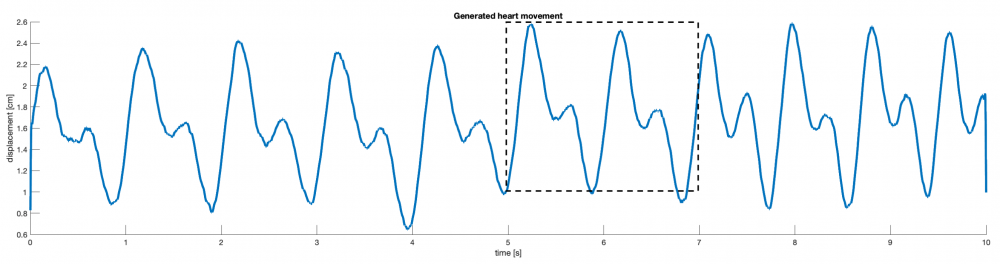
De eerste stap in de ontwikkeling van dit robot-chirurgische systeem was de introductie van een hartverplaatsingsmodel: een harmonisch model waarvan de huidige toestand kan worden geüpdatet op basis van real-time metingen. Aandacht werd daarbij ook besteed aan de inclusie van de ademhalingsverplaatsing. Dit model wordt verenigd met een statistische toestandschattingsmethode -een ‘unscented Kalman filter’ (UKF)- om tot de implementatie van een toestandsschatter te komen. Verder is ook een filter ontworpen die moet voorzien in een ‘on-line’ afleiding van een arbitrair signaal. Tegenover meer conventionele methoden levert deze betere resultaten. Daarnaast wordt een methode ontwikkeld om voorspellende informatie uit het elektrocardiogramsignaal (ECG) te exploiteren. De vermelde systemen werden tezamen geïmplementeerd met een controlestrategie om zo de performantie van het systeem te kunnen toetsen. Instellen van het volledige geïntegreerde systeem met realistische waarden en parameters onthult acceptabele prestaties.







