Robot palletiseergrijper
Palletiseren is het stapelen van goederen op een pallet volgens een vast stapelpatroon. Om met een robotarm zakken te kunnen stapelen is een specifieke grijper vereist. De grijper moet om kunnen gaan met de vormvariaties van zakken en voldoende steun waarborgen om een hoge stapelkwaliteit te garanderen.
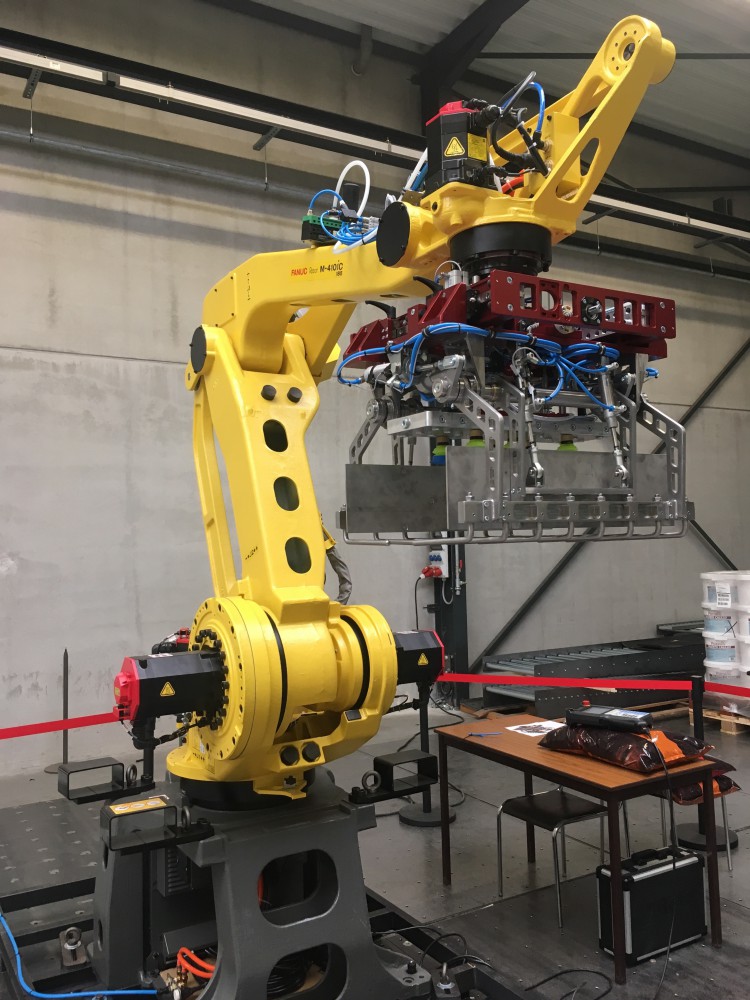
Deze masterproef bestaat uit het ontwerpen van een universele palletiseerklem voor zakken. Het project heeft alle stappen doorlopen van een reëel ontwerpproces, van projectomschrijving tot de verwezenlijking van een prototype. Het gehele proces startte met een marktonderzoek voor het vinden van het meest geschikte grijpprincipe. Met de resultaten van het onderzoek en bestaande ideeën is er op papier een 2D schets gemaakt. Deze geeft weer hoe de verschillende functies samen komen. Hieruit is vervolgens de 3D schets opgebouwd die langzaam evolueerde tot een volledig ontwerp. Het optimaliseren van de kleinere details is de laatste stap van het ontwerpproces. Na het maken van werktekeningen is de productie van de onderdelen op gang gekomen. Op het moment dat alle onderdelen gemaakt zijn en de kooponderdelen binnen zijn is de montage van de grijper gestart. Tijdens de montage werd meteen duidelijk of de toleranties goed zijn gekozen en/of nageleefd. Dit is voor een beginnend ontwerper een goede leerschool. De finale stap in het project is het testen van het prototype.

De test van een product is het moment waar de hele projectplanning naartoe werkt. Deze tests zijn vlot verlopen, alle vitale functies van de grijper werkten zoals gewenst. Zo is de grijper perfect in staat om een zak van het pick point op te nemen en op een pallet neer te leggen. De vorken en centreerplaten vervullen hun taak goed bij het centreren en ondersteunen van de zak. Dit geeft een goede en stabiele stapelkwaliteit. De grootste problemen zijn opgedoken bij het testen van de vacuümgrijper. Het samenstellen van een geschikte vacuümgrijper is vooral gebaseerd op de trial en error methode. Door het uitwisselen en verplaatsen van de zuignappen is een geschikte grijper samengesteld. Nu is de grijper dus in staat om een volledige pallet te palletiseren en depalletiseren.
De scriptie bevat vooral de theoretische achtergrond die het project onderbouwt. Eerst werd bepaald aan welke eisen de grijper moet voldoen en welke resultaten worden verwacht op het einde van het project. Deze informatie is terug te vinden in de projectomschrijving. Vanuit deze projectomschrijving is er vervolgens een plan van aanpak en planning opgesteld die ervoor moet zorgen dat het project tot een goed einde kwam. De eerste stap in de planning is het uitvoeren van een marktonderzoek dat vooraf ging aan het hele mechanisch ontwerp. Om het project en de termen in de scriptie beter te kunnen volgen zijn vervolgens de verschillende functies en de werking van de grijper gedetailleerder omschreven. Het volgende hoofdstuk beschrijft hoe de toegepaste componenten gekozen zijn op vlak van functie en installatiemogelijkheden. Wanneer de componenten geselecteerd zijn is het voor een mechanisch ontwerp noodzakelijk om de deze keuze ook analytisch te onderbouwen. Deze berekeningen zijn terug te vinden in de calculaties. Naast het mechanische aspect is ook de financiële kant belangrijk om een project rendabel te maken. Om hier een beeld van te vormen werd een algemene kostenanalyse uitgevoerd. Om het project te vervolledigen is er achteraan nog een risicoanalyse toegevoegd die de gevaren analyseert en maatregelen beschrijft.
Bibliografie
Bijlage A Round cylinders DSNU/ESNU (op USB)
Bijlage B Compact cylinders ADN/AEN (op USB)
Bijlage C Eichenberger spindel 16x5 factsheet
Bijlage D Continental Belt Calculation
Bijlage E Spindellagers
Bijlage F THK_Tool_SHS20LC_calculation
Bijlage G Kogelbussen
Bijlage H Stress Analysis Report_Dwarsligger
Bijlage I Stress Analysis Report_Support_Rail
Bijlage J Stress Analysis Report_Arm_Vork
Bijlage K Stress Analysis Report_Arm_Centreerplaat
Bijlage L Stress Analysis Report_Basisplaat_Slede
Bijlage M Bijlage_M_Stress Analysis Report_Support_As
Bijlage N Bijlage_N_Fanuc_900iA_Serie
Bijlage O Bijlage_O_Risicoanalyse








