Robotchirurgie: de weg naar minimaal invasieve hartoperaties
- GianniBorghesan
Bypass operaties
Traditioneel zijn 'coronary artery bypass graftings (CABGs)', beter bekend als 'bypass operaties' invasieve procedures waarvan een incisie in de borstkas een cruciaal deel uitmaakt. Technologische ontwikkelingen de voorbije decennia hebben de stand van zaken gebracht tot het punt waar men met behulp van een chirurgisch robotsysteem het grootste deel van de procedure minimaal invasief kan uitvoeren, ware het een kijkoperatie. Op een zeker punt is het echter nog steeds onoverkomelijk dat een opening wordt gemaakt. Deze verleent de chirurg toegang tot het hart, waarna hij het mechanisch stabiliseert en de kransslagader naait.
Nut van een bewegingscompensatiesysteem
En dit is waar een bewegingscompensatiesysteem een cruciale rol kan opeisen. Gegeven dergelijk systeem, dat de beweging van het hart op robuuste en accurate wijze schat en compenseert, wordt de incisie overbodig en kan de volledige procedure als kijkoperatie worden uitgevoerd. Bijgevolg wordt het ongemak van een bypass procedure gereduceerd naar dat bijhorende het operatief verwijderen van de wijsheidstanden.
Ontwerp en ontwikkeling
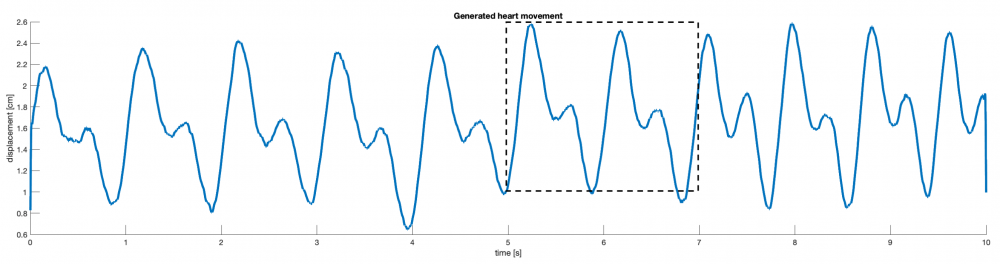
De eerste stap in de ontwikkeling van dit robot-chirurgische systeem was de introductie van een hartverplaatsingsmodel: een harmonisch model waarvan de huidige toestand kan worden geüpdatet op basis van real-time metingen. Aandacht werd daarbij ook besteed aan de inclusie van de ademhalingsverplaatsing. Dit model wordt verenigd met een statistische toestandschattingsmethode -een ‘unscented Kalman filter’ (UKF)- om tot de implementatie van een toestandsschatter te komen. Verder is ook een filter ontworpen die moet voorzien in een ‘on-line’ afleiding van een arbitrair signaal. Tegenover meer conventionele methoden levert deze betere resultaten. Daarnaast wordt een methode ontwikkeld om voorspellende informatie uit het elektrocardiogramsignaal (ECG) te exploiteren. De vermelde systemen werden tezamen geïmplementeerd met een controlestrategie om zo de performantie van het systeem te kunnen toetsen. Instellen van het volledige geïntegreerde systeem met realistische waarden en parameters onthult acceptabele prestaties.
Bibliografie
-
[1] Cancer Care of Western New York, “Coronary artery bypass grafting.” URL:https://www.cancercarewny.com/content.aspx?chunkiid=14782, last checked on 20-02-2020.
-
[2] The Society of Thoracic Surgeons, “Coronary artery disease.”
URL: https://ctsurgerypatients.org/adult-heart-disease/ coronary-artery-disease, last checked on 19-02-2020.
-
[3] W. Gong and J. Cai, “Robot-assisted coronary artery bypass grafting improves short- term outcomes compared with minimally invasive direct coronary artery bypass grafting,” Journal of Thoracic Disease, pp. 459–468, 2016.
-
[4] M. Diodato and E. G. Chedrawy, “Coronary artery bypass surgery: the past, present and future of myocardial revascularisation,” 2014. Article ID: 726158.
-
[5] A. Weiss and A. Elixhauser, “Trends in operating room procedures in u.s. hospitals, 2001-2011,” Healthcare Cost Util. Project, pp. 1–14, 01 2014.
-
[6] O. Yadava and A. Kundu, “On or off pump coronary artery bypass grafting – is the last word out?,” Indian Heart Journal, vol. 65, 2013.
-
[7] University of California San Francisco, “Minimally invasive aortic valve surgery.”
URL: https://adultctsurgery.ucsf.edu/conditions--procedures/ minimally-invasive-aortic-valve-surgery.aspx, last checked on 20-02- 2020.
-
[8] G. Mariscalco and F. Musumeci, “The minithoracotomy approach: A safe and effective alternative for heart valve surgery,” Ann Thorac Surg, 2014. 2014;97:356- 64.
-
[9] S. G. Raja, “Short-term clinical outcomes and long-term survival of minimally invasive direct coronary artery bypass grafting,” 2018.
[10] Mathworks, “An optimal state estimator.” URL: https://uk.mathworks.com/ videos/understanding-kalman-filters-part-3-optimal-state-estimator--1490710645421. html, last checked on 28-04-2020, 2020.
[11] E. Wan and R. van der Merwe, “The unscented kalman filter,” Wiley Publishing, 2001.
H. Bruyninckx and T. Lefevre, “Kalman filters for nonlinear systems: A com- parison of performance.,” 2001.
A. Gelb, “Applied optimal estimation,” M.I.T. Press, 1974.
G. Einicke, Smoothing, Filtering and Prediction: Estimating the Past, Present
and Future. Amazon Prime Publishing, 2019.
R. Piche, “Online tests of kalman filter consistency,” International Journal of
Adaptive Control and Signal Processing, vol. 30, no. 1, pp. 115–124, 2016.
Y. Bar-Shalom and X.-R. Li, Estimation and tracking: principles, techniques,
and software. The Artech House radar library, Boston: Artech house, 1993.
J. B. Rawlings, Moving Horizon Estimation. London: Springer London, 2013.
O. Bebek and M. C. Cavusoglu, “Intelligent control algorithms for robotic- assisted beating heart surgery,” IEEE Transaction on Robotics, pp. 468–480, 2007.
M. Swindle and A. Smith, “Comparative anatomy and physiology of the pig,” Scandinavian Journal of Laboratory Animal Science, vol. 25, pp. 11–21, 01 1998.
T. Watanabe, P. M. Rautaharju, and T. F. McDonald, “Ventricular action potentials, ventricular extracellular potentials, and the ecg of guinea pig.,”
Circulation Research, vol. 57, no. 3, pp. 362–373, 1985.
W. L. Brogan, Modern Control Theory (3rd Ed.). USA: Prentice-Hall, Inc.,
1991.
S. G. Yuen and D. T. Kettler, “Robotic motion compensation for beating heart intracardiac surgery,” The International Journal of Robotics Research, pp. 1355–1372, 2009.
“The open d1namo dataset: A multi-modal dataset for research on non-invasive type 1 diabetes management.” URL: https://zenodo.org/record/1421616# .Xo3-pi2Q3RY, last checked on 08-04-2020, 2018.
G. Vrooijink and A. Denasi, “Model predictive control of a robotically actuated delivery sheath for beating heart compensation,” International Journey of Robotics Research, pp. 193–209, 2017.
Faulhaber, “Linear dc-servomotors series lm 1247 specifications.” URL: https:// www.faulhaber.com/fileadmin/Import/Media/EN_LM1247_11_FMM.pdf, last checked on 03-05-2020, 2020.
PI USA, “V-277 pimag high-load linear actuator.” URL: https: //static.pi-usa.us/fileadmin/user_upload/physik_instrumente/ files/datasheets/V-277-Datasheet.pdf, last checked on 03-05-2020, 2019.
[27] Mathworks, “Equation solving algorithms.” URL: https://uk.mathworks.com/ help/optim/ug/equation-solving-algorithms.html#f51887, last checked on 26-04-2020, 2020.
[28] G. S. Almasi and A. Gottlieb, Highly Parallel Computing. USA: Benjamin- Cummings Publishing Co., Inc., 1989.
[29] E. Csencsics and G. Schitter, “System design and control of a resonant fast steering mirror for lissajous-based scanning,” IEEE/ASME Transactions on Mechatronics, vol. PP, pp. 1–1, 07 2017.
[30] S. Z. Sullivan, R. D. Muir, J. A. Newman, M. S. Carlsen, S. Sreehari, C. Doerge, N. J. Begue, R. M. Everly, C. A. Bouman, and G. J. Simpson, “High frame-rate multichannel beam-scanning microscopy based on lissajous trajectories,” Opt. Express, vol. 22, pp. 24224–24234, Oct 2014.








